Pixhawk组装中的一些BUG
本文共 401 字,大约阅读时间需要 1 分钟。
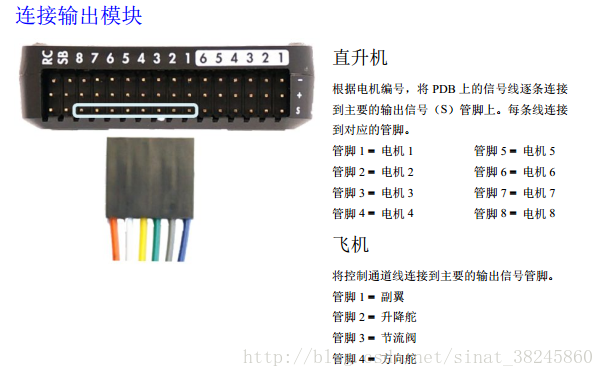
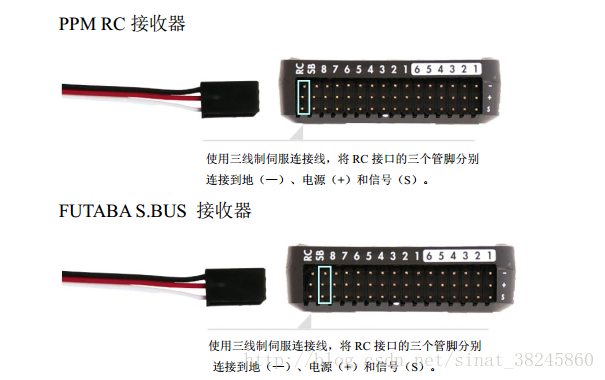
1.接线方法

2.电调校准
PIXHAWK电调校准步骤:
第一,先打开遥控器,油门推到最大。
第二,给飞控供电,此时电调会捕捉到油门最大量程。
第三,保持遥控不变,飞控断电,然后再次飞控上电,接着按下安全开关直至稳定点亮。
第四,遥控油门推到最小,电调捕捉后,完成校准。
3.遥控器


需要一个蜂鸣器和安全开关:
prearm :safety button :没有按下安全开关,不给电调上电的话,按安全开关也没用,因为电调没信号输出。
prearm: need 3d fix:校准加速度计和陀螺仪,有时候重新上电也可以解决这个BUG。
preamr : compass variance:校准磁力计。
开着遥控器开机有时候会卡在初始化界面(现象:地面站连接很慢,Initialing APM ,获取参数很慢),LED红蓝闪烁。
解决方法:关掉遥控器重新上电。
油门推最高给遥控器上电,会进入电调校准环节。
你可能感兴趣的文章
JavaScript编程简介:DOM、AJAX与Chrome调试器
查看>>
通过Maven管理项目依赖
查看>>
通过Spring Boot三分钟创建Spring Web项目
查看>>
Spring的IoC(依赖注入)原理
查看>>
Guava快速入门
查看>>
Java编程基础:static的用法
查看>>
Java编程基础:抽象类和接口
查看>>
Java编程基础:异常处理
查看>>
Spring MVC中使用Thymeleaf模板引擎
查看>>
Spring Boot构建简单的微博应用
查看>>
Spring处理表单提交
查看>>
Spring MVC异常处理
查看>>
Leetcode 1180. Count Substrings with Only One Distinct Letter [Python]
查看>>
PHP 7 的五大新特性
查看>>
php实现socket(转)
查看>>
PHP底层的运行机制与原理
查看>>
深入了解php底层机制
查看>>
PHP中的stdClass 【转】
查看>>
XHProf-php轻量级的性能分析工具
查看>>
PHP7新特性 What will be in PHP 7/PHPNG
查看>>